Last Updated on January 4, 2026 by Maged kamel
Mohr’s circle of inertia-fourth case.
In this post, we will discuss Mohr’s circle of inertia, the fourth case. In this case, the moment of inertia about the x-axis is less than that of the y-axis, and the product of inertia Ixy is negative.
We expect the tangent value of 2θp to be negative from the equation tan 2θp, since Ixy is negative.

What is the orientation of the principal axes for Mohr’s circle of the inertia-fourth case?
We have the general expression for the moment of inertia for any oriented axis; we call it Ix’. For Mohr’s circle of the inertia-fourth case, the value can be a maximum when the angle 2θ has a cosine of a negative value, and the sine value is positive. This angle is called 2φp1 or ( 2θp1). This angle is measured from the x-axis.
The other 180-degree direction has an angle of 2φp2 or ( 2θp2) is also measured from the x-axis, but this angle will have a positive cosine value and a negative sine value.
The angle 2φp1 will be located in the second quarter, while angle 2φp2 will be located in the fourth quarter.

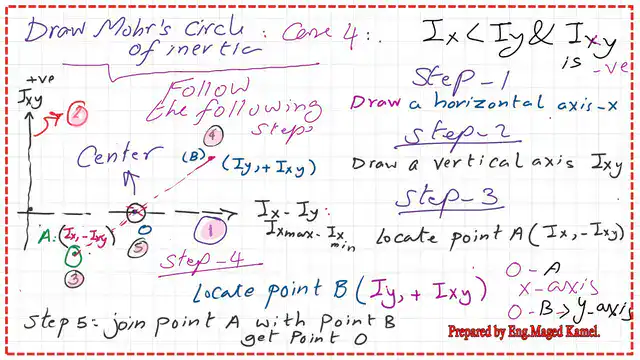
The steps used to draw Moh’s circle of inertia-fourth case.
The first two steps are to draw the two orthogonal axes. The first axis represents the Moment of inertia values, Ix, Iy, and Imax, and the minimum values, while the second axis represents the values of the product of Inertia, Ixy.
The coordinate of point A is (Ix, -Ixy), -Ixy as given from the case date.
Point B has a coordinate (Iy,+Ixy), and the value of Ixy is the negative value identical to the Ixy of point A. Locating Points A and B with their respective values of Ix and Iy, as shown in the next slide image.
Join Points A and B and get the middle point of line AB, which is the point of the Circle center.
The radius value is the sqrt( (Iy-Ix/2)^2+Ixy^2).
Start from point O and draw the circle with the estimated radius value. The circle will intersect with the line in two points C and E.

Need for two mirror points A’ and B’ in Mohr’s circle of inertia-fourth case.
Setting point A’, which is a mirror of point A and has a coordinate of (Ix,+Ixy), gives the direction of the maximum moment axis U.
This point A’ will enable us to rotate the x-axis or line OA clockwise by the value of 2φp1. The x-axis will be horizontal, and the U line will also have a new direction represented by line OA’.
Point B’ is the mirror of point B and has a coordinate of (Iy,-Ixy) and is used to indicate the direction of the V-axis, which is the direction of the minimum moment of the inertia axis.
Angle 2φp1 is the angle between the X-axis and the central axis U, which is the angle enclosed between OA and Line OE. Point E is the point of the maximum inertia value.
Angle 2φp2 is the angle between the x-axis and Minor axis V, which is the angle enclosed between OA and Line OC. Point C is the point of the minimum inertia value.
The distance from the vertical axis Ixy to point C will give the Minimum value of inertia, while the distance from the same axis to point E will provide the maximum value of inertia.
In the normal view, the x-axis is horizontal, whereas in Mohr’s circle for the inertia-fourth case, it is oriented at an angle of 2φp1 from the U-direction.
From the relation of tan 2φp, we have a negative value of tangent, which means that the V axis will have an enclosed angle measured in the clockwise direction.
The angle 2φp1 can be estimated as equal (180-2φp2).

The direction of U and V axes in Mohr’s circle of inertia-fourth case.
Join points OA’ to get the U-direction or the major axis direction. Join the two points O and B’ to get the V- direction for the normal view, the view from which the x and y axes are orthogonal in the normal view.
The following slide image shows the directions of both the U and V axes.

In the standard view, where x and y are 90 degrees from each other, we join Point C with Point A’ to get the U direction. To get the V direction, the minor axis direction, we join Point C with Point B’. The following slide image shows the directions of both the U and V axes.

For the orientation of two axes Ixy and Ix, so the x-axis is horizontal, we can find that point E is the point at which Ix’ = Ix at 2θ = zero and Ix’y’ =-Ixy since the line OE is the horizontal line, while point A’ has Ix’=Iy and Ix’y’=+Ixy.
It is shown that this drawing satisfies the Case-4 requirement that Ix < Iy and Ixy < 0.
An angle of (φp2) rotates the V axis in a clockwise direction from axis X, while the U axis is rotated by an angle of ( 2φp1) in the anticlockwise direction from axis X.

You can download and review the content of this post through the following pdf file.
In the next post-13, we will solve a problem that covers”a solved problem for Mohr’s circle of inertia, fourth case.
The post 14- a solved problem, the inertia value for a given direction.
This is a link to a useful external resource. Calculator for Cross Section, Mass, Axial & Polar Area Moment of Inertia, and Section Modulus.